手机微信扫一扫联系客服
联系电话:18046269997



 APP安装免填邀请码
APP安装免填邀请码 社交分享效果统计
社交分享效果统计 广告投放数据统计
广告投放数据统计 CPA/CPS推广效果统计
CPA/CPS推广效果统计 App地推统计
App地推统计 App拉起
App拉起 网页/应用内直接安装
网页/应用内直接安装 Android多渠道打包
Android多渠道打包 App安装后自动绑定
App安装后自动绑定 App分享效果统计
App分享效果统计 Deeplink深度链接
Deeplink深度链接 手机微信扫一扫联系客服
 389
389高德全量开源 ABot-M0,把数据、算法与模型一起开放,说明具身智能正在从单点模型竞争进入生态竞争。本文面向开发者、产品和增长团队,拆解具身机器人入口、跨终端归因与场景传参的增长方法。
高德全量开源 ABot-M0,表面上看是一次模型发布,实际上是在把具身智能的“通用大脑”能力往产业侧往前推了一步。对开发者和增长团队来说,真正值得关心的不只是模型强不强,而是当机器人、App、云端任务和场景入口开始一起工作时,用户和任务到底从哪里来、怎么被识别、又怎么被持续追踪。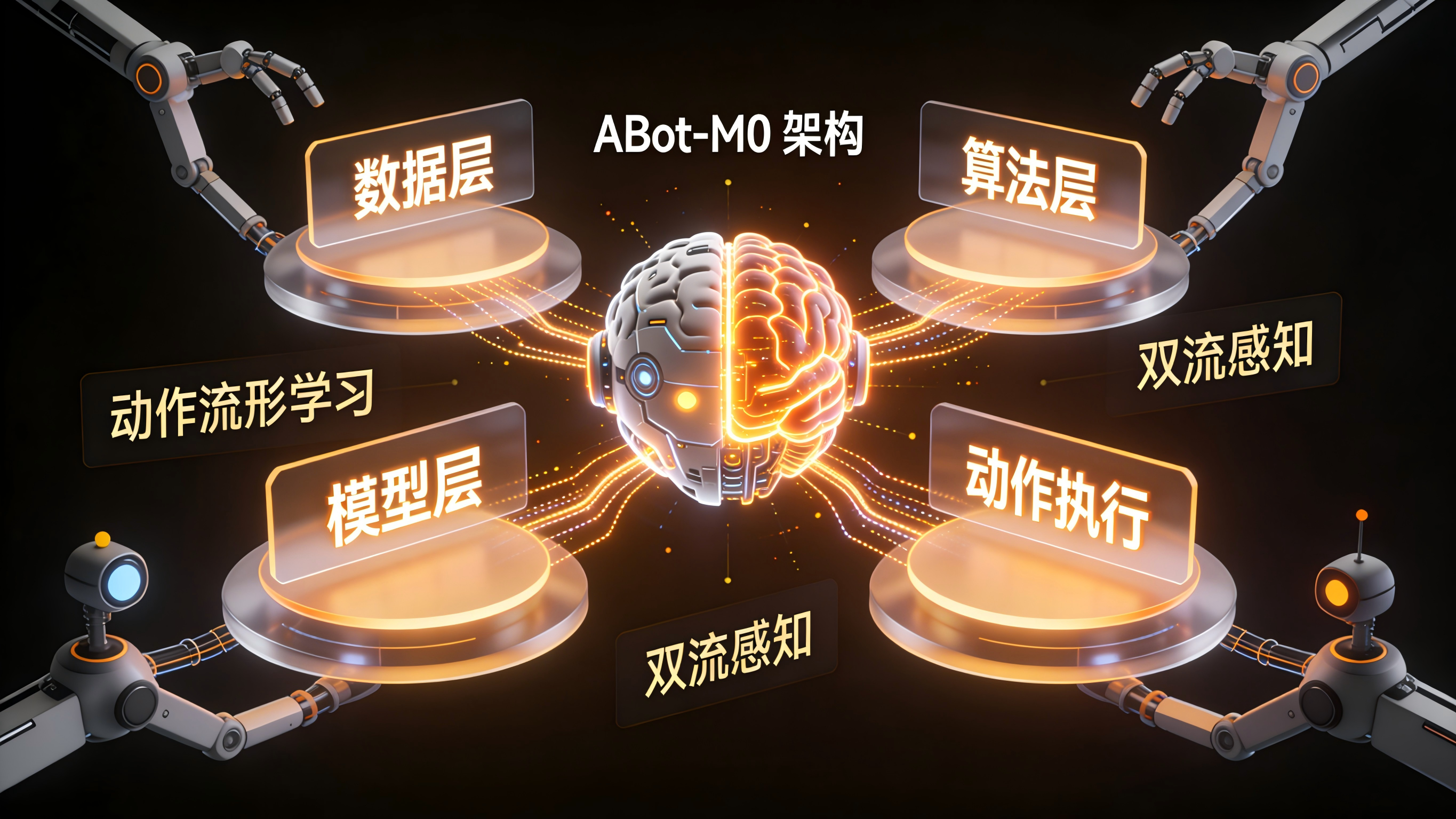
这意味着,具身智能不再只是算法竞赛,而是开始进入“入口、任务、数据、归因”一起设计的新阶段。谁先把这些链路理顺,谁就更容易把机器人能力变成可落地、可分发、可商业化的产品体系。
ABot-M0 是高德宣布全量开源的具身操作基座模型,开源范围覆盖数据、算法和模型三层:数据层开放了 UniACT,包含 600 万条以上真实操作轨迹;算法层开源了模型架构、训练框架,以及动作流形学习(AML)和双流感知架构;模型层则把预训练模型和完整工具链一起放出,开发者可以更快适配工业、家庭等场景。
更关键的是,ABot-M0 在多个基准上取得了 SOTA,尤其在 Libero-Plus 上任务成功率达到 80.5%,相比此前标杆方案提升接近 30%。这说明具身智能已经从“能不能做”走到了“谁能更快复制到不同机器人形态和任务场景”的阶段,而开源正在成为标准化和生态扩张的重要手段。
 具身机器人和传统 App 最大的不同,是用户触达和任务发起不再总是发生在手机屏幕上。用户可能在展台、门店、家庭场景、车载环境,甚至由别的智能体先发起任务,再转到机器人本体执行,真正的入口会变得非常分散。
具身机器人和传统 App 最大的不同,是用户触达和任务发起不再总是发生在手机屏幕上。用户可能在展台、门店、家庭场景、车载环境,甚至由别的智能体先发起任务,再转到机器人本体执行,真正的入口会变得非常分散。
如果只看“某个模型被下载了”或者“某个 App 被安装了”,很容易漏掉关键路径:是哪个终端触发的、是谁发起的任务、是展示演示还是生产任务、最终有没有真正落到设备执行。对于具身智能产品来说,现有平台报表通常只能看到一部分表层数据,却看不到任务流、设备流和场景流如何交织,这就是后续归因和运营最容易失真的地方。
ChannelCode:先给具身入口统一命名
问题是,具身入口天然多样,可能来自展会演示、机器人手机、家庭终端、App 内绑定页,也可能来自 AI Agent 发起的任务请求。
做法上,可以先用统一的渠道编号把这些入口标记起来,把“设备形态、入口场景、任务来源、活动版本”绑定到同一套编码体系里。比如同样是机器人配网,不同场景下可以分别标识为展会体验、家庭首次绑定、企业批量部署等。
好处是,团队能清楚知道哪类入口带来的是“演示流量”,哪类入口带来的是“真实使用流量”,从而避免把所有机器人触点都当成同一种来源来统计。
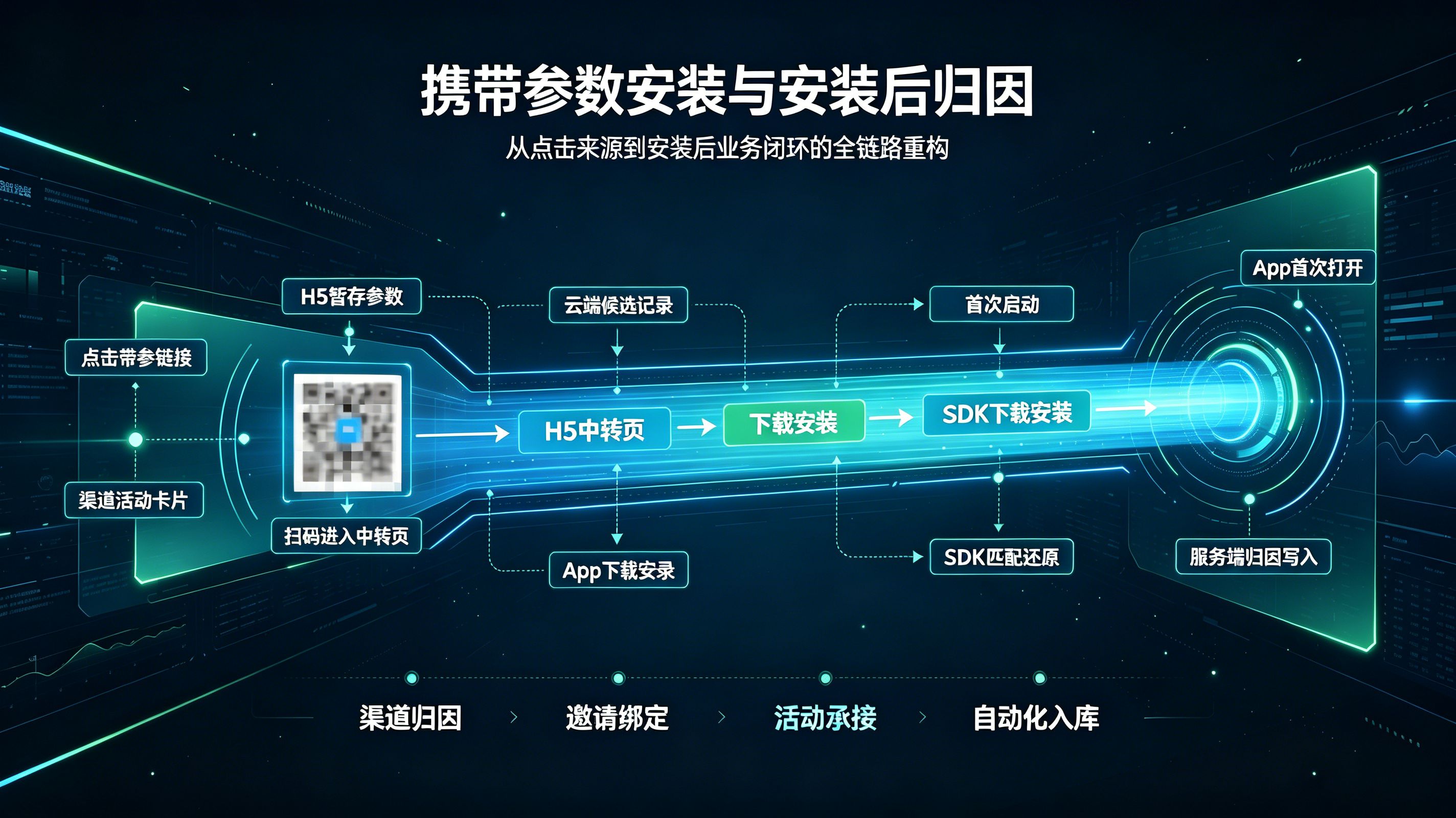
智能传参安装:把任务意图带进设备
问题是,具身场景里最值钱的信息不是“装了什么”,而是“为什么装、要做什么”。如果用户或 Agent 只是让设备去执行一个动作,但安装或初始化阶段没有把意图带进来,后续体验就会变得很笼统。
做法上,可以在安装、绑定、首次激活或任务创建环节传入场景参数,比如 scene=home_service、scene=warehouse_pickup、scene=demo_showcase,再结合设备类型和任务类型做初始化路由。
好处是,设备首次运行时就能直接进入对应流程,不需要用户反复选择,也能减少“装完还要再配置一遍”的摩擦。
参数还原 + 事件模型:把机器人动作变成可分析链路
问题是,具身智能不是单次点击,而是一连串动作:发起任务、识别环境、接收指令、执行动作、反馈结果。只看某一个点,无法解释成功率,也无法解释失败在哪一步。
做法上,可以把入口参数、设备 ID、任务 ID、控制终端、执行结果统一沉淀到事件模型里,形成跨终端的任务链路。这样,团队不只是知道“机器人执行过一次任务”,还知道这次任务是从哪里发起、经过了哪些系统、在哪一步完成或失败。
好处是,产品团队可以更准确地分析不同场景下的成功率,增长团队可以判断哪些入口更容易形成高频使用,研发团队也能更快定位问题出在入口、参数还是执行层。
注:本文讨论的“具身入口归因、跨终端任务链路、参数还原到设备执行”的部分内容,属于对未来分发和协同趋势的前瞻性技术延展与思考;其中一些高阶定制链路尚未作为标准功能全量实现,如开发者有类似需求,可联系 Xinstall 客服团队进行技术探讨或定向研发拓展。
面向开发 / 架构团队
具身智能一旦从实验室走向真实场景,就不能只关注模型精度,还要关注入口字段、任务字段和设备字段。建议至少预留 channelCode、scene、device_type、workflow_id、agent_id、risk_level 这类字段,方便后续做任务流追踪和设备归因。
如果未来要接 App、车机、家庭终端、机器人本体或云端 Agent,最好在第一版架构里就把事件总线和参数传递规则设计清楚,否则后面会很难补。
面向产品 / 增长团队
具身机器人不是单点硬件销售,而是持续任务入口。建议不要只盯着出货量,而要看绑定率、任务完成率、重复唤醒率和场景复用率。
如果你能识别哪些入口带来的是试用型用户,哪些入口带来的是高频任务用户,就能更合理地分配演示资源、销售资源和后续投放预算。
具身机器人为什么比普通 App 更需要归因?
因为它的入口更分散,任务链路更长,且很多动作并不是在手机里完成的。只看安装数,很难知道到底是谁触发了任务、任务在哪个设备上执行、结果是否真的发生。
ABot-M0 这种开源模型对产品团队意味着什么?
它意味着具身智能更容易被快速接入和二次开发,但也意味着竞争会更快走向生态层。产品团队不能只比模型参数,更要比谁能把场景、设备和任务链路串起来。
具身智能里的“场景参数”为什么重要?
因为同样是机器人,家庭、工业、展会和仓储的交互方式完全不同。场景参数能决定初始化流程、权限策略、任务模板和后续运营方式,直接影响转化和留存。
机器人场景也要做智能传参吗?
要,而且比很多移动端场景更重要。机器人往往是“设备先执行、用户后确认”,如果不把入口意图带进去,后面的绑定、调试和复用都会变得很慢。
ABot-M0 的开源,说明具身智能正在从“单个机器人能不能聪明一点”转向“整个机器人生态能不能统一起来”。当数据、算法、模型一起开源后,行业会更快进入平台化竞争,拼的不只是训练能力,还有场景分发和任务组织能力。
对 App 和 B 端团队来说,这种变化的意义很明确:未来很多流量不再来自传统页面点击,而是来自设备推荐、任务编排和多终端协同。现在正是重构数据字段、入口归因和任务模型的窗口期,谁先把“机器人入口”纳入全链路体系,谁就更容易在下一轮终端竞争中占据主动

应用商店拦截后怎么归因?下载来源追踪原理解析
2026-06-26

广告监测链接怎么做?App安装来源追踪原理解析
2026-06-26

App传参安装怎么做?全渠道参数还原原理解析
2026-06-26

谷歌重组AI编程小组?追赶Anthropic的节奏被迫加速
2026-06-26
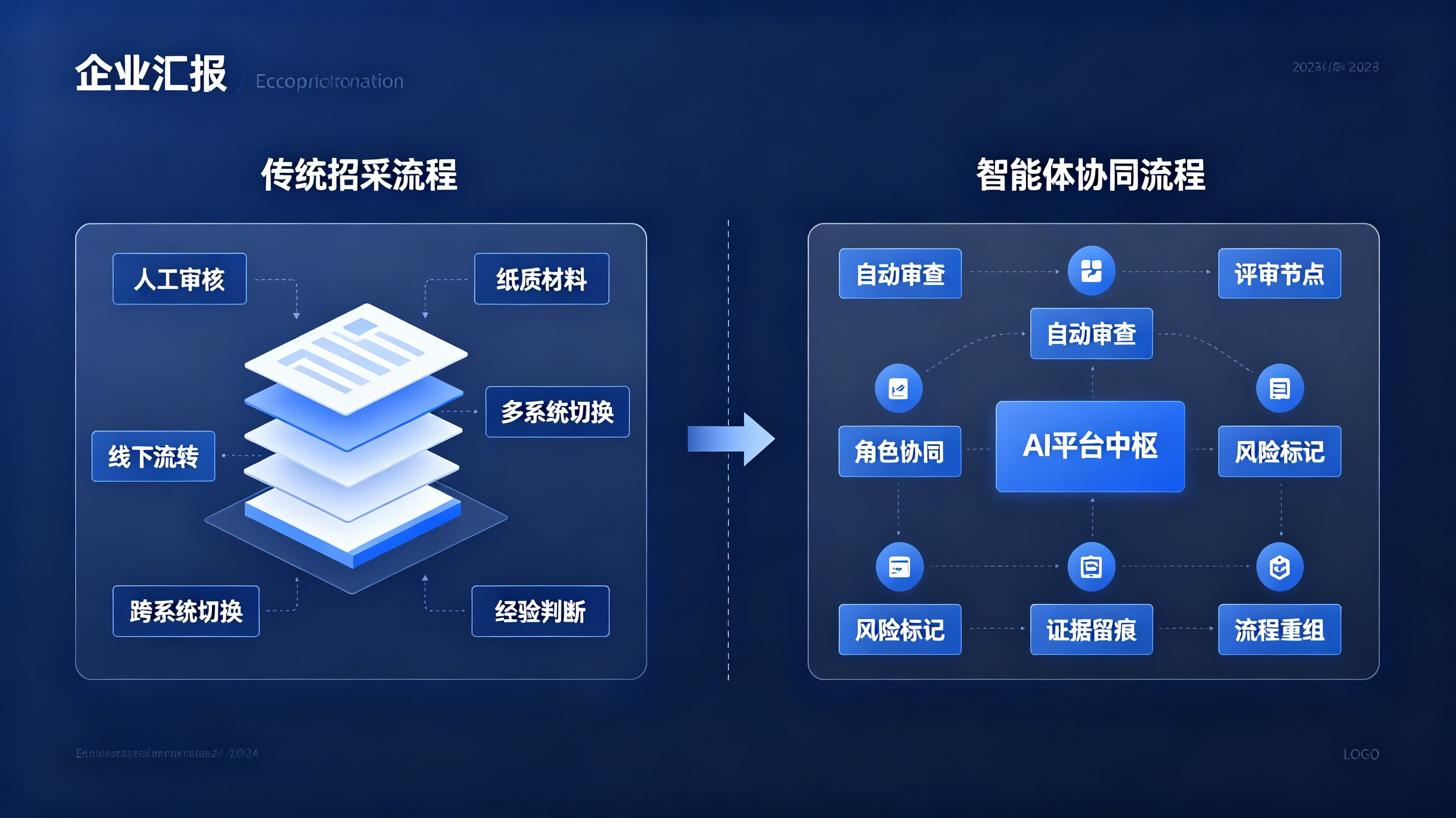
科大讯飞AI招采平台2.0如何重构流程?招投标开始进入全链路智能化
2026-06-26
携带参数安装怎么实现?安装传参与归因技术解析
2026-06-25

Agent Ready怎么落地?企业智能体进入统一管理时代
2026-06-25

360与惠普签署战略合作?AI安全与终端融合进入落地期
2026-06-25

荣耀终端要被AI重做?MWC上海上终端变革的真实信号
2026-06-25

免填邀请码怎么实现?自动绑定邀请关系技术解析
2026-06-24

深度链接归因怎么做?安装后参数找回技术解析
2026-06-24

豆包专业版正式推出?AI收费战开打背后的订阅分层与商业验证
2026-06-24

毁灭全人类游戏今日登陆新主机?爆款主机游戏跨端种草考验一键拉起基建
2026-06-24
即梦AI上线原生4K视频生成?打破高糊魔咒,AI视觉算力重塑营销分发底座
2026-06-24

免打包渠道统计是什么?App免填邀请码技术原理解析
2026-06-23